La elección de un buen motor eléctrico es esencial para cualquier proyecto tecnológico. Y en electromecánica, la precisión es fundamental, por ello, los servos son los elegidos para provocar el movimiento de multitud de dispositivos. Pero para ello, conocer qué es un servomotor y cómo funciona es un requisito inicial, por ello en este artículo se destacará todo lo que hay que descubrir al respecto.
Qué es un servomotor y cómo funciona este elemento
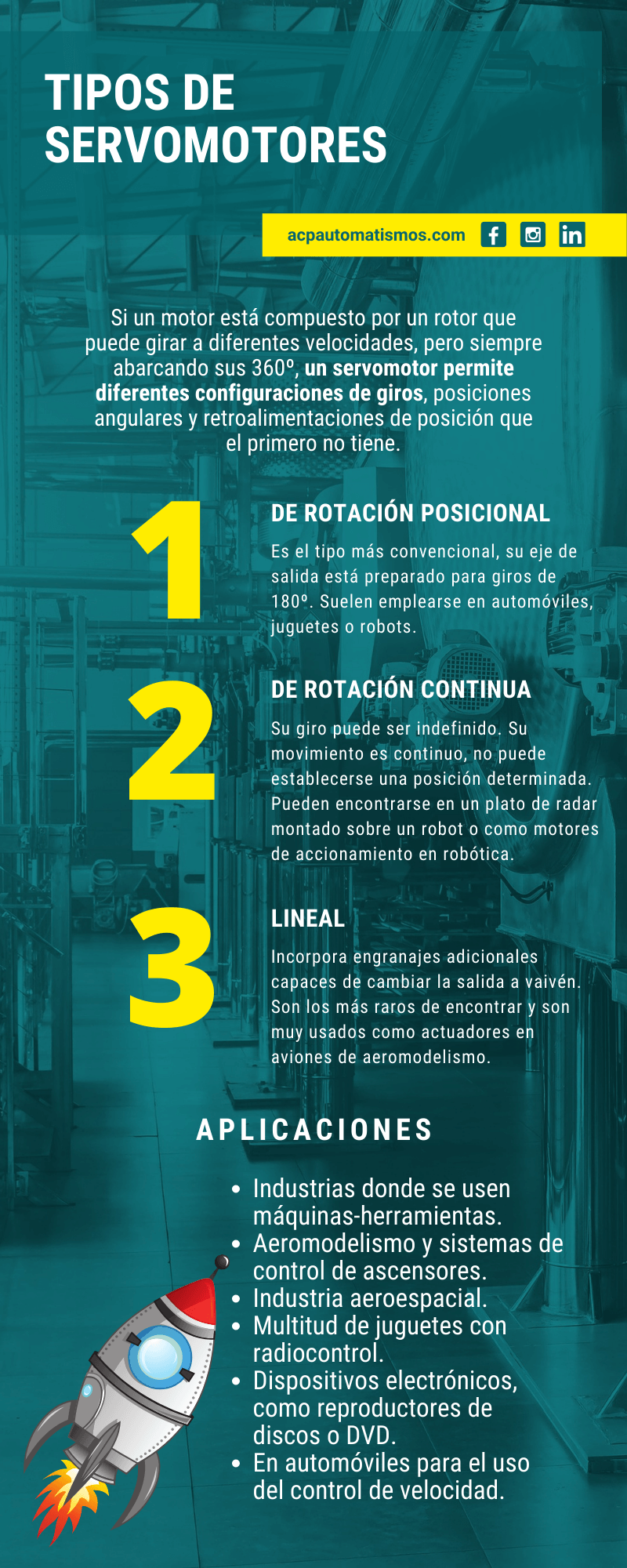
Si un motor está compuesto por un rotor que puede girar a diferentes velocidades, pero siempre abarcando sus 360º, un servomotor permite diferentes configuraciones de giros, posiciones angulares y retroalimentaciones de posición que el primero no tiene.
Si queremos establecer una definición de un servomotor, esta puede ser la de un servomecanismo de bucle cerrado capaz de utilizar una retroalimentación de posición para poder controlar su posición y velocidad de giro. Estos dispositivos están formados por una señal de control, que puede ser digital o analógica, que es la que establece el comando para determinar la posición final de su eje.
Funcionamiento
Todo servomotor debe tener una frecuencia de repetición y un pulso mínimo y otro máximo. A través de su cable de control es posible enviar pulsos eléctricos de ancho variable, también llamados PWM o modulaciones de ancho de pulso.
Estas máquinas, en general, están diseñadas para girar 180º en total, 90º hacia cada lado, aunque pueden modificarse para conseguir el giro completo. La posición neutra se determina cuando el servo presenta la misma cantidad de rotación potencial tanto en un sentido como en otro.
El PWM que se envía al dispositivo determina la posición que se requiere del eje y tiene una duración de pulso determinada. El servomotor está preparado para reconocer uno de ellos cada 20 milisegundos, por lo que la longitud del mismo determinará hasta dónde deberá girar el rotor del motor que lleva incluido.
De esta forma, cada pulso de 1,5 ms, hará un giro de 90º. Si es inferior a 1,5 ms, se moverá de forma contraria a las agujas del reloj, hasta llegar a la posición inicial. Por el contrario, si detecta una señal superior a 1,5 ms, el servo girará de acuerdo a las agujas del reloj hasta alcanzar los 180º.
Componentes de un servomotor
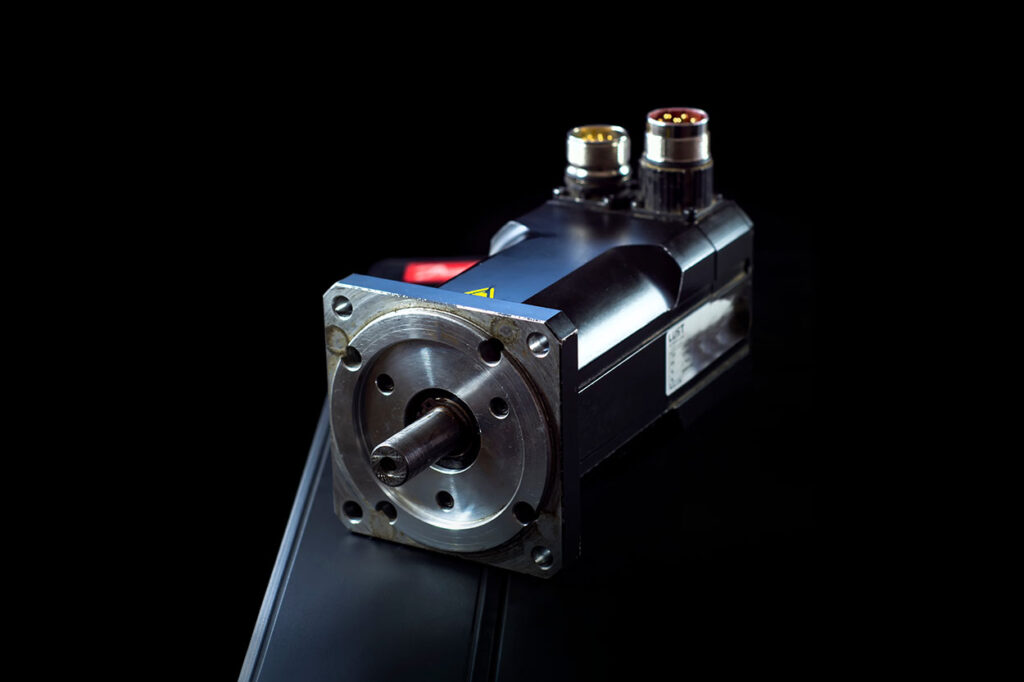
Una vez que sabemos qué es un servomotor y cómo funciona, es necesario conocer sus componentes y cómo actúa cada uno de ellos. La mayoría de los modelos están compuestos por un motor eléctrico DC o de corriente continua, una señal de control y diferentes engranajes que establecen tanto su velocidad de giro como su posición. Todos estos elementos están recubiertos por una carcasa hecha de diferentes materiales, desde plásticos a metales.
El eje se acopla a la caja de engranajes a modo de transmisión, la cual es la encargada de suministrar el torque del motor y establecer la posición fija cuando sea necesario. Al igual que ocurre con los motores normales, la velocidad y el torque son directamente proporcionales. El encargado de mantener la posición y el movimiento del rotor es el circuito eléctrico.
El engranaje está diseñado para establecer el movimiento del eje del rotor y, para ello, debe producirse una inercia superior al que se daría en un motor normal. Por lo que un servo no puede considerarse como un motor convencional, sino como un conjunto de elementos en los que este forma parte integrante de su constitución.
Por último, el controlador de movimiento, también denominado servocontrolador, es el cerebro de todo el sistema; a través de él es donde se dan las instrucciones necesarias de velocidad, movimiento, sentido y aceleración deseadas.

Tipos de servomotores
Si hemos entendido qué es un servomotor y cómo funciona, es fácil colegir que están disponibles en multitud de tamaños, pero su diferenciación fundamental la presenta la variable de su movimiento. De acuerdo a esto, podemos encontrar los siguientes tipos:
- Servomotor de rotación posicional: Es el tipo más convencional, su eje de salida está preparado para giros de 180º. Suelen emplearse en automóviles, juguetes, vehículos de control remoto o robots, entre sus numerosas aplicaciones.
- Servomotor de rotación continua: Similar al anterior, con la excepción de que su giro puede ser indefinido. En estos tipos, la señal de control no ajusta su posición estática, sino que es interpretada como la velocidad y dirección de la rotación y su movimiento es continuo, es decir, no puede establecerse una posición determinada. Estos servos pueden encontrarse en un plato de radar montado sobre un robot o como motores de accionamiento empleados en robótica.
- Servomotor lineal: Es una modificación del posicional que incorpora engranajes adicionales capaces de cambiar la salida a vaivén. Son los más raros de encontrar y son muy usados como actuadores en aviones de aeromodelismo.
Cuáles son sus aplicaciones
Los servomotores son muy indicados para su uso en aquellas aplicaciones que requieren variaciones rápidas de velocidad sin producir calentamientos en los motores como en la robótica, en fabricación de diferentestipos de accionamientos eléctricos, automatismos industriales y en mecanizados por control numérico por ordenador o CNC.
Pero además, una vez que se sabe qué es un servomotor y cómo funciona, puede utilizarse para:
- Industrias donde se usen máquinas-herramientas, como pueden ser las de ensamblaje, embalaje, manipulación de metales, automatización en fábricas o robótica, entre algunos ejemplos.
- Aeromodelismo y sistemas de control de ascensores.
- Industria aeroespacial.
- Multitud de juguetes con radiocontrol.
- Dispositivos electrónicos, como reproductores de discos o DVD.
- En automóviles para el uso del control de velocidad.

Ahora que se conoce qué es un servomotor y cómo funciona, seguro que podemos identificarlos en el funcionamiento de multitud de dispositivos e, incluso, si se pertenece al sector del diseño industrial, seguro que son perfectos para su inclusión en innovadores modelos tecnológicos para lanzar al mercado.